
|
Over the past two weeks the girls have made great progress on our robot. We finished the basic drive train for our robot, and are currently working on the processing program for Autonomous. The ball collector we created and tested was modified from our robot, Nox. It is designed to collect balls by working like a vacuum without bristles. We brought in new materials and through trial and error were able to adjust the ball collector for smaller balls. For the gear delivery part of the challenge we are working on a slide and catch mechanism that in the end will put the gear on the spoke. 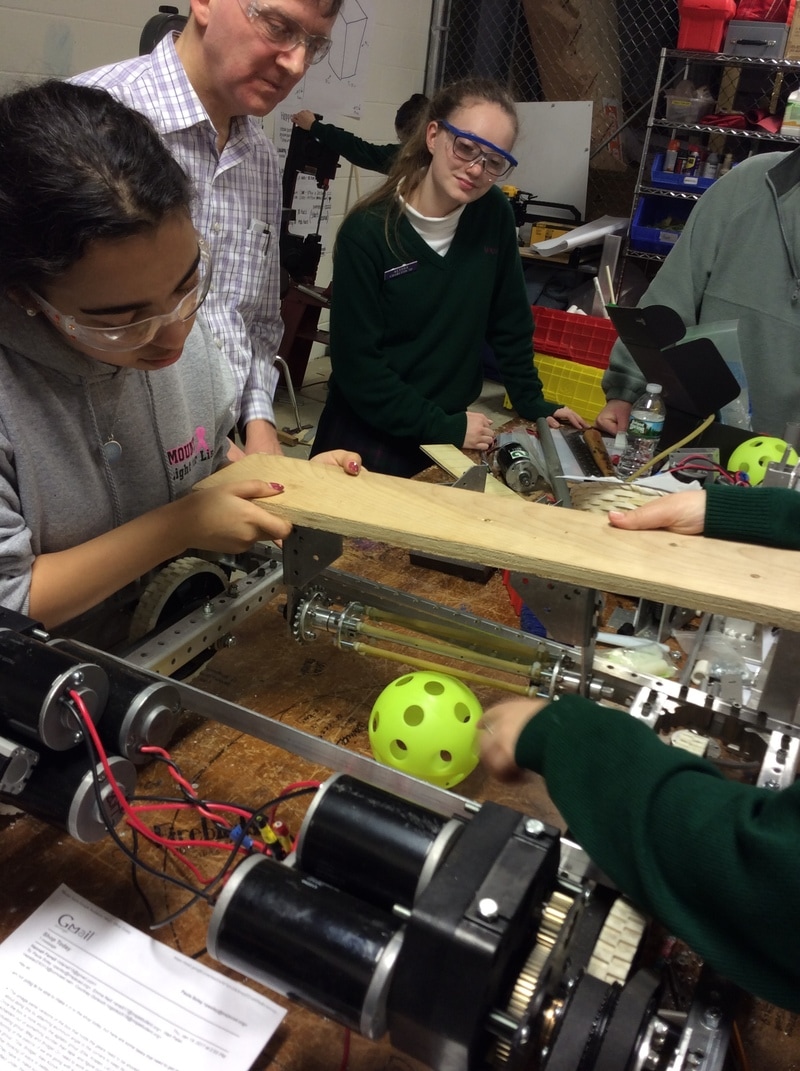  
0 Comments
|
